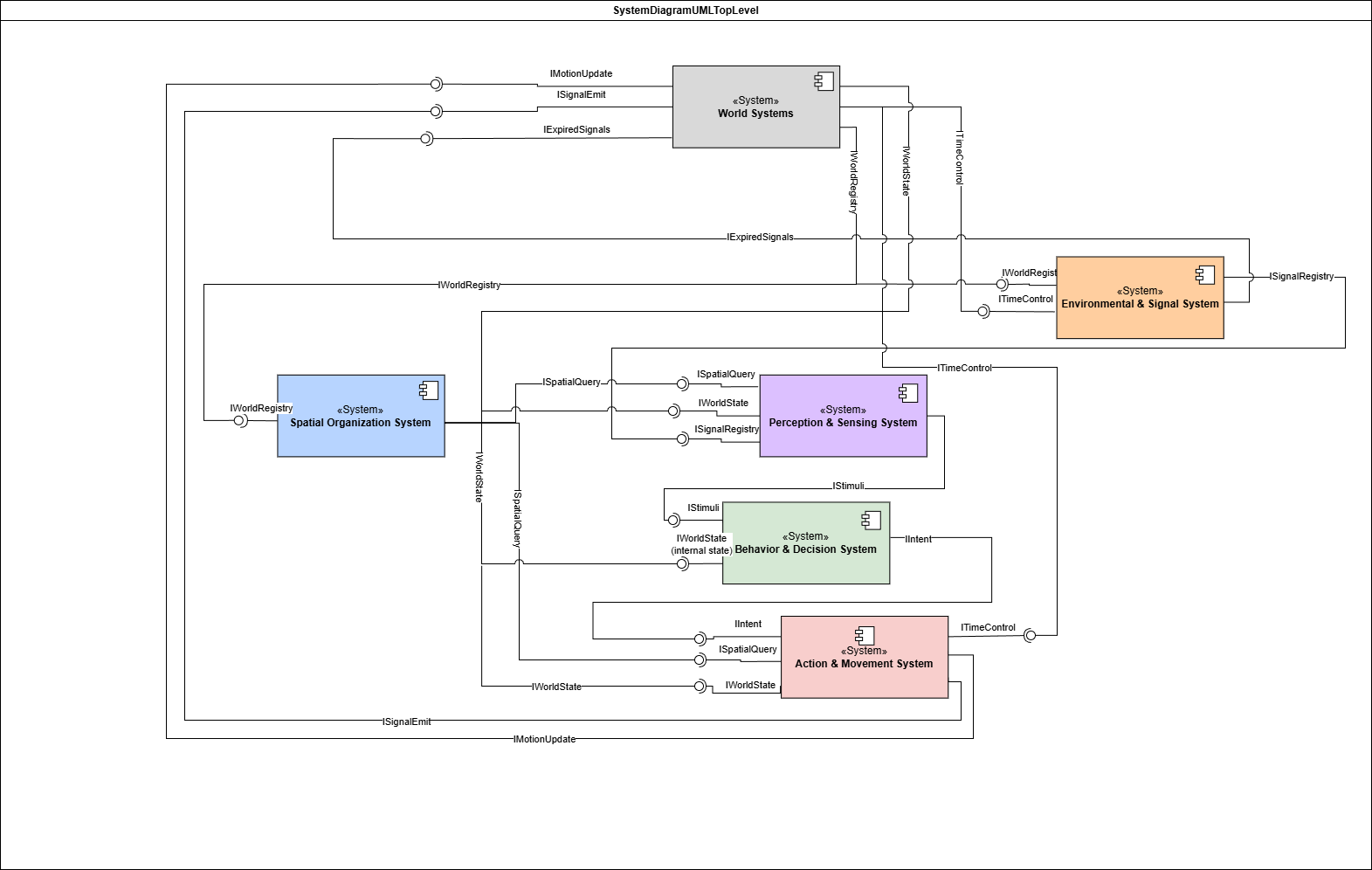
Over the past couple of days, I shifted away from broad conceptual thinking and moved into formal system design. Rather than treating the simulation as a collection of features, I began mapping it as an interconnected architecture using UML component diagrams. This process helped clarify responsibilities, define data flow, and establish clean boundaries between systems before committing to implementation. The simulation is now structured as six core systems that work together to produce visible and actionable world behavior.
One of my primary goals during this stage was reducing ambiguity. Complex simulations can quickly become unstable if systems overlap responsibilities or share loosely defined data. By diagramming the architecture, I was able to explicitly define who owns what, how information moves through the simulation, and where state authority lives. The result is a framework where world state, spatial logic, environmental signals, perception, decision making, and movement are all clearly separated yet tightly coordinated.
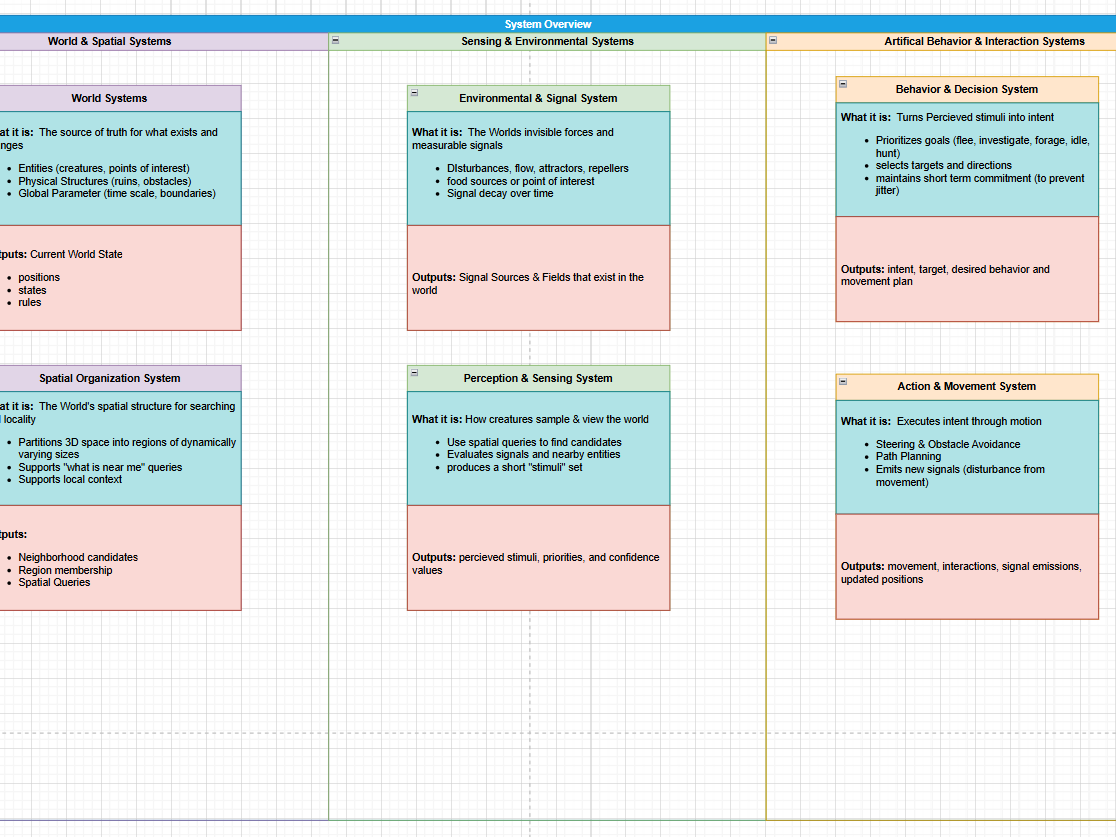
Top level view of the simulation framework illustrating how world state, space, signals, perception, decision making, and movement interact.
System Overview Diagram
At the highest level, the simulation operates as a continuous loop of information and influence:
World → Spatial Organization → Signals → Perception → Decision → Movement → World
The world maintains state and boundaries. The spatial system provides locality awareness. Signals represent environmental influence. Perception interprets the world. Behavior selects intent. Movement executes change. Each system contributes to a closed feedback cycle that produces emergent activity.
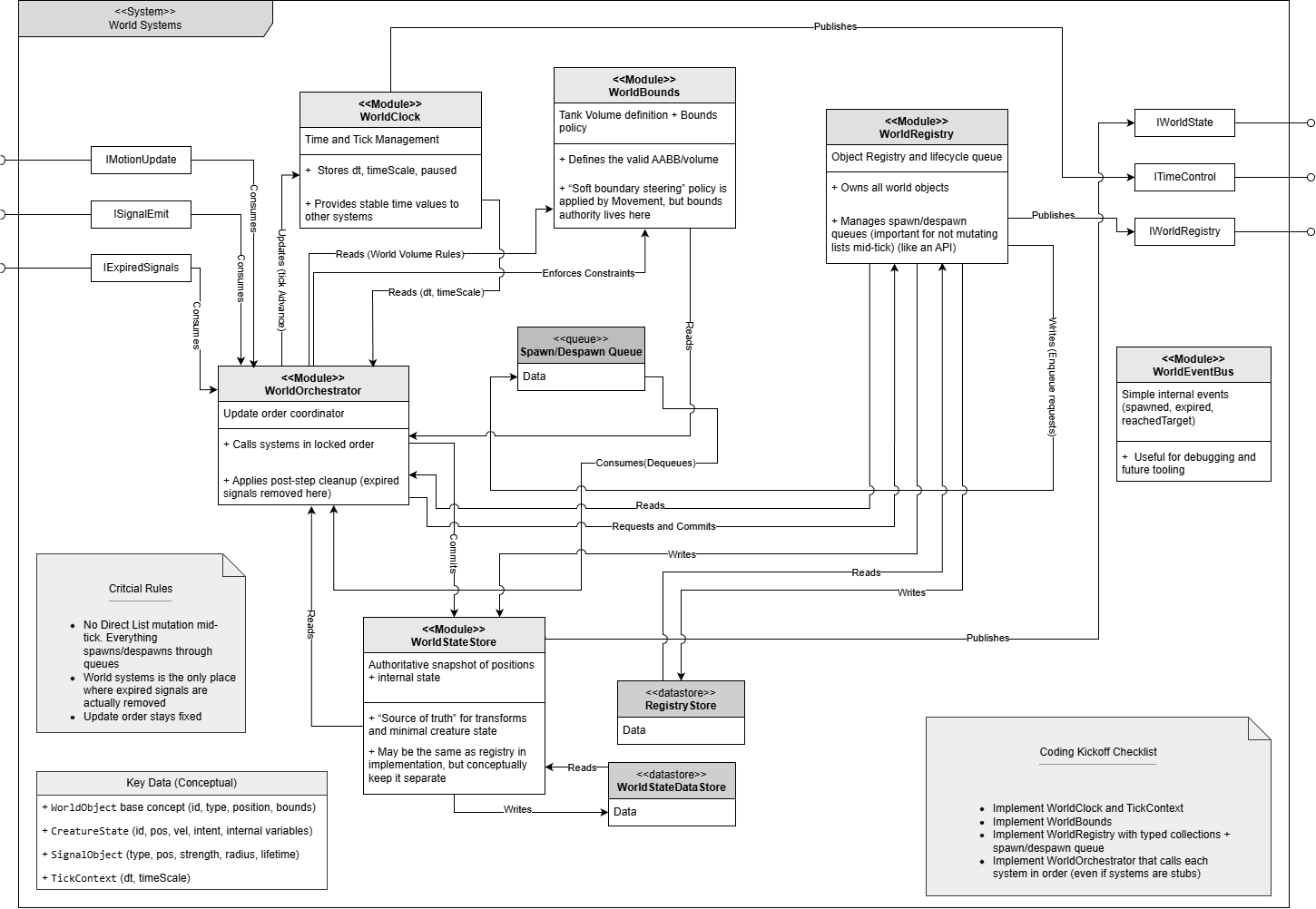
Internal structure of World Systems highlighting state ownership, registry control, and queued lifecycle management.
World Systems
World Systems functions as the authoritative container of the simulation. It maintains global state, object registration, world bounds, and time progression. Conceptually, this system acts as the simulation’s source of truth, ensuring that every other system operates against a stable and deterministic representation of the environment.
A critical architectural decision here is centralized authority. World Systems is the only location where object lifecycle changes are committed. Spawns, despawns, and signal removals are processed through queues rather than immediate list mutation. This is a choice made to preserve the simulations update stability and prevents structural conflicts during simulation ticks. While largely invisible from a viewer perspective, this system governs the coherence and reliability of the entire simulation.
Ticks: for the uninitiated
Throughout this project, I frequently refer to the simulation running in “ticks.” A tick can be thought of as a single update step in the simulation’s timeline. During each tick, every system processes its logic in a fixed order, using the current world state to produce changes that will define the next state. Rather than updating continuously in an unstructured way, the simulation advances in these discrete evaluation cycles.
This approach is common in simulation and game systems because it preserves stability and predictability. By locking the update order and preventing systems from modifying shared data arbitrarily mid-tick, the simulation avoids structural conflicts, inconsistent reads, and unpredictable behavior. In simpler terms, ticks ensure that the world evolves in a controlled, deterministic sequence rather than chaotic overlap.
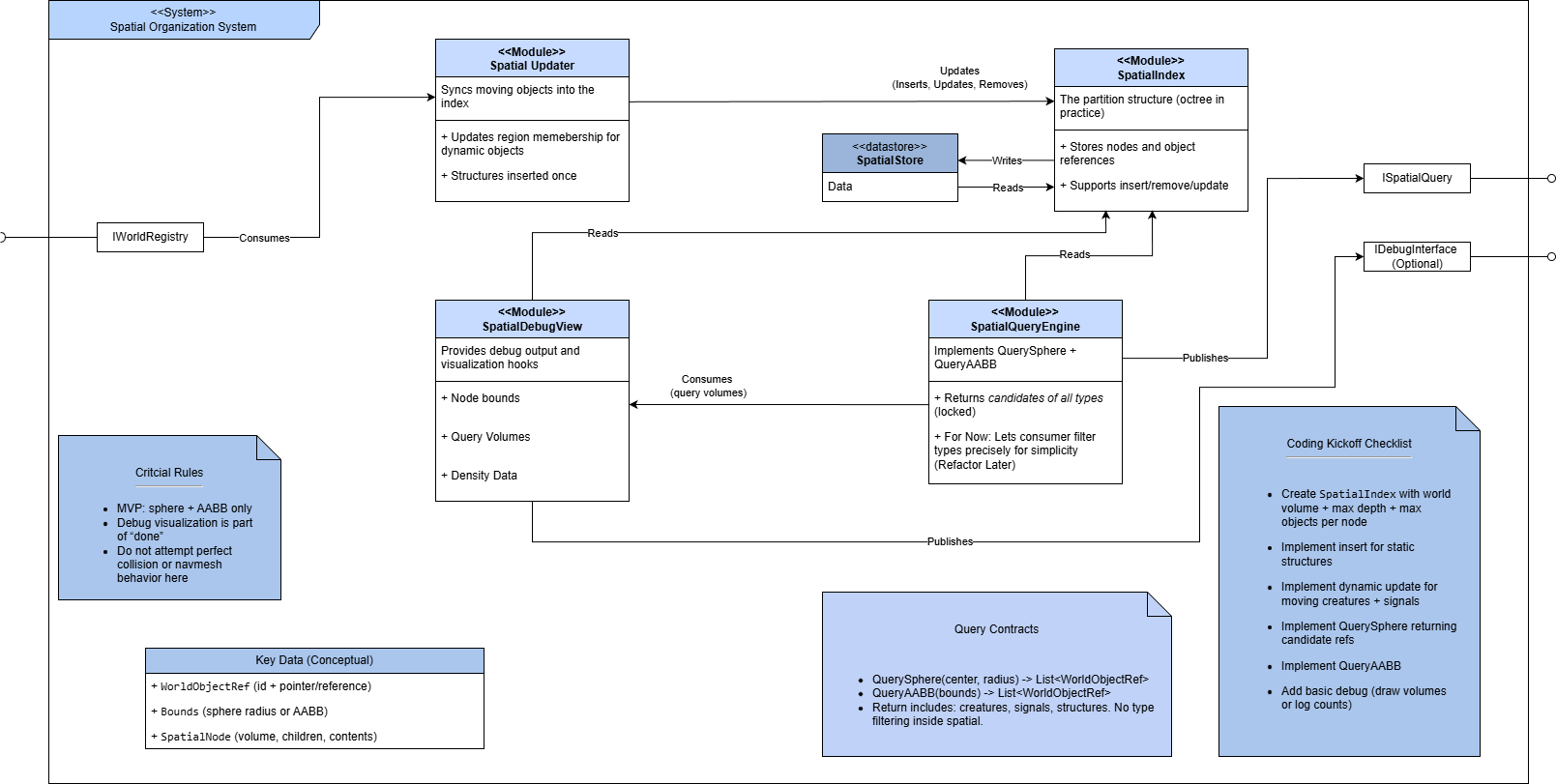
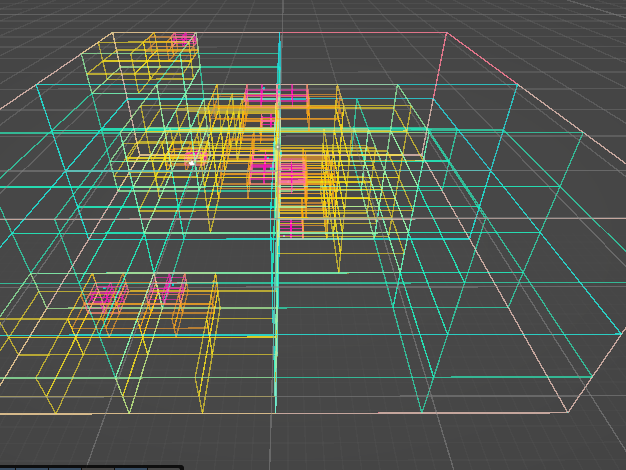
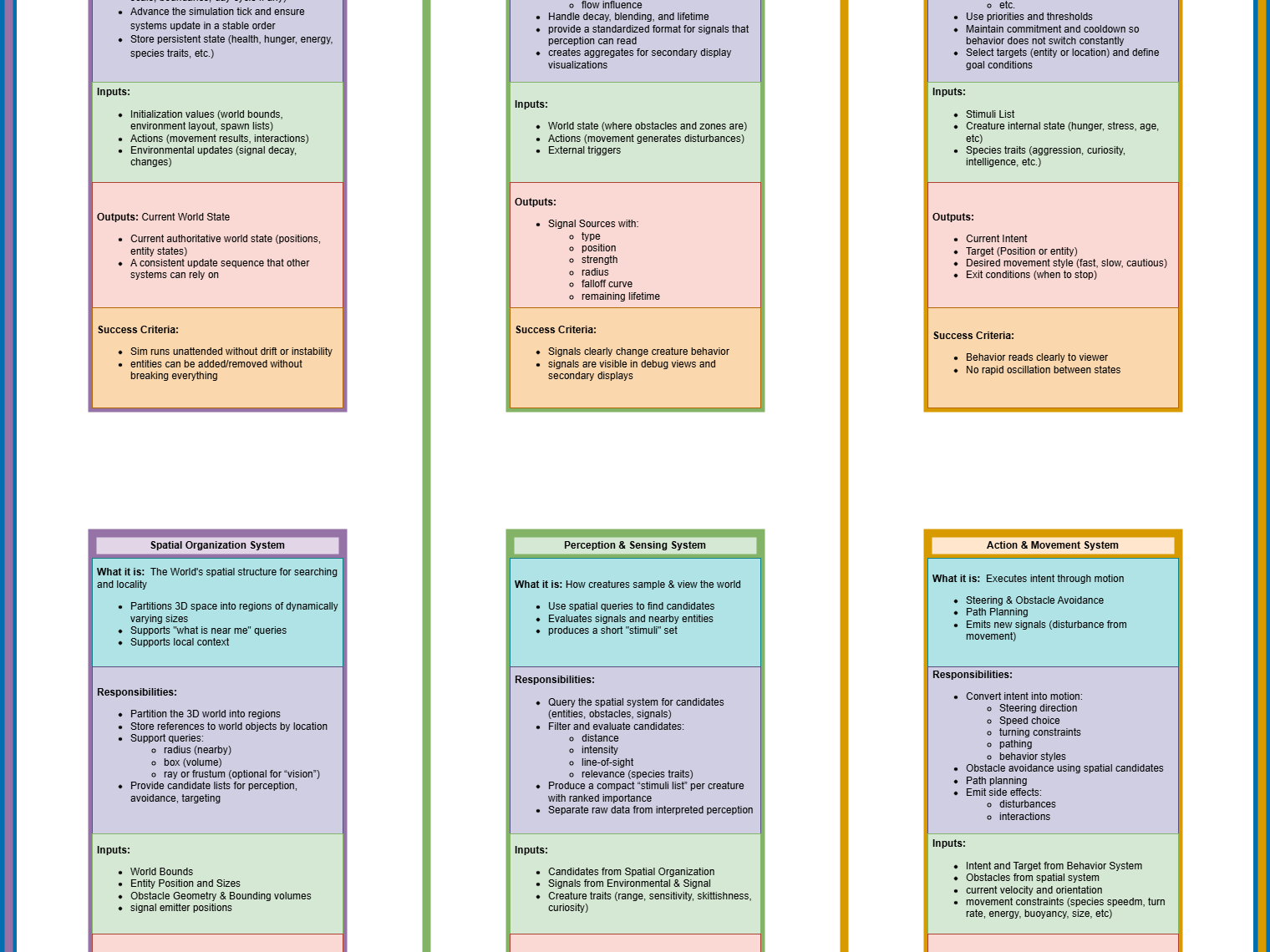
The Spatial Organization System provides locality awareness through spatial indexing, enabling efficient proximity queries without complete global full-scale scans.
Spatial Organization System
The Spatial Organization System provides the structural backbone for locality queries. Rather than allowing systems to scan the entire world, spatial indexing enables efficient searches for nearby objects. This system is designed around an octree-like partitioning model, separating static structures from dynamic entities.
A key design principle is responsibility separation. The spatial system does not interpret meaning. It simply returns candidates. Filtering and evaluation occur downstream in perception and behavior systems. This keeps the spatial layer purely structural and highly reusable.
Debug visualization is treated as part of completion rather than an afterthought. Since spatial reasoning is invisible by default, visualizing node bounds and query volumes is essential for both development and exhibition tooling. Which is essential for displaying just how complex three-dimensional space can really be.
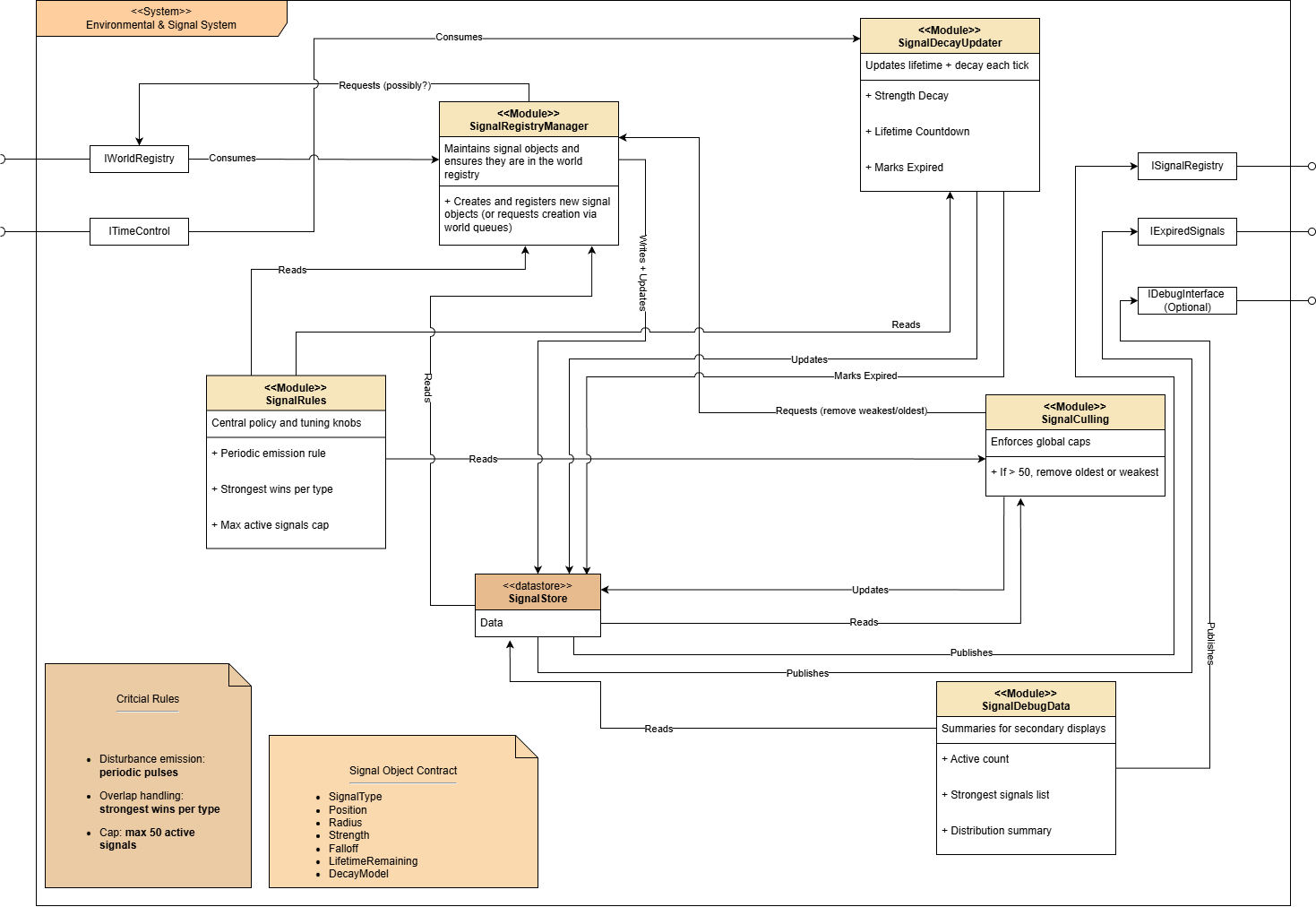
Signals function as dynamic world objects, translating movement and environmental activity into perceivable influence fields. Internal signal lifecycle management including emission rules, decay, culling, and expiration handling.
Environmental & Signal System
Signals represent environmental influence as actual world objects rather than invisible calculations. Disturbance signals, the MVP signal type for this project-scope, are emitted periodically during movement, decay over time, and expire cleanly through world cleanup processes. These objects, while invisible to the viewer, function as the underlying informational layer that agents use to interpret activity within the environment.
Two rules stabilize the signal field. Emission is periodic rather than continuous, and overlap handling follows a strongest-wins model per signal type. This prevents runaway accumulation and reduces perceptual noise within the ecosystem.
Conceptually, this system transforms physical motion into environmental information. It acts as the connective tissue between movement, perception, and world response.
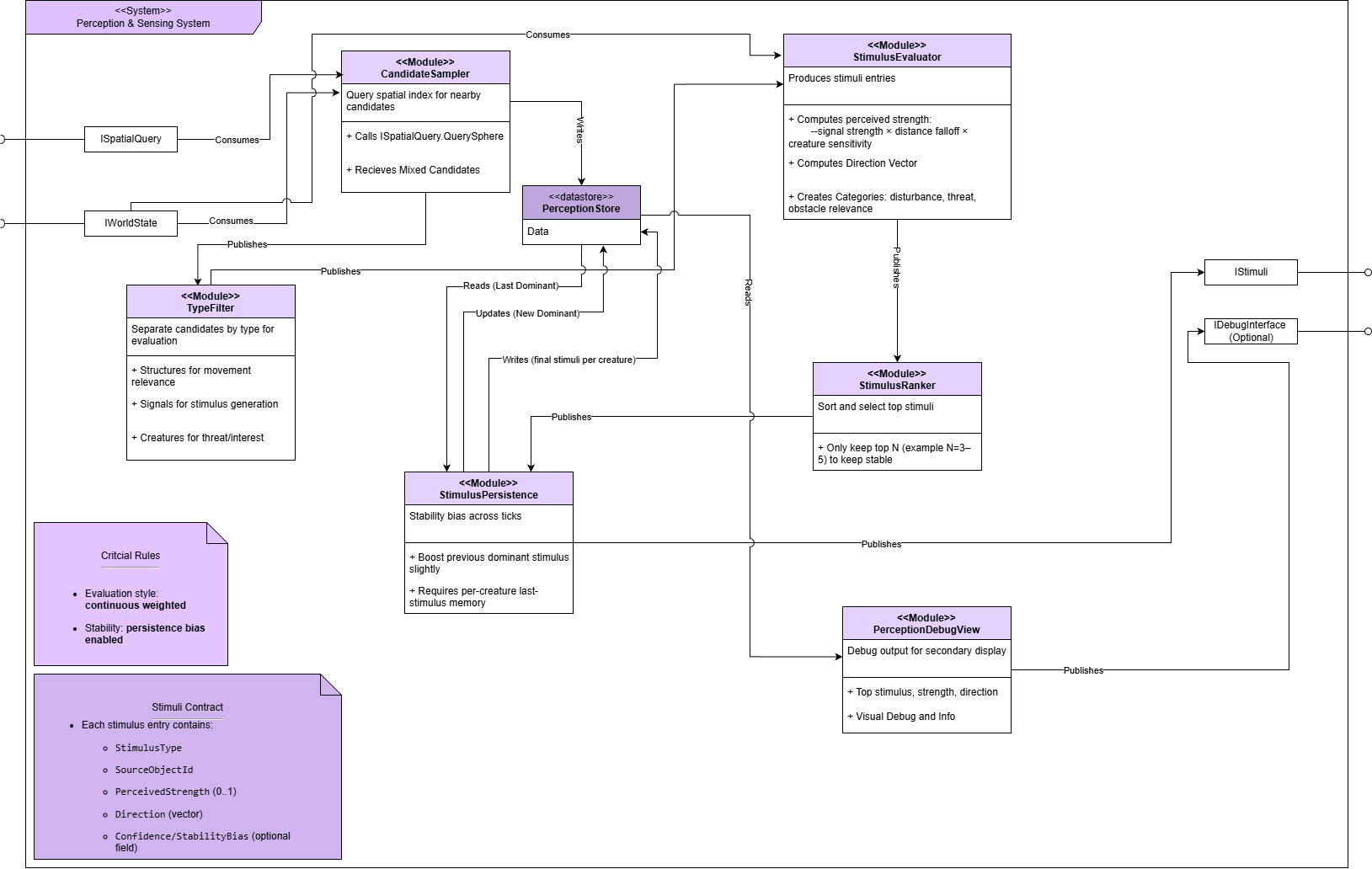
Sensory evaluation pipeline converting spatial candidates into weighted stimuli with persistence bias.
Perception & Sensing System
Perception transforms world objects and signals into stimuli. Rather than binary detection, stimuli use a continuous weighted evaluation model, allowing influences to rise and fall smoothly. A persistence bias further stabilizes perception by slightly favoring previously dominant stimuli.
This system intentionally separates sensing from decision making. It interprets environmental data but does not decide behavior. The output is structured stimuli information that can be consumed by any decision logic without coupling perception to specific behaviors. Perception is where the world becomes meaningful to the agents.
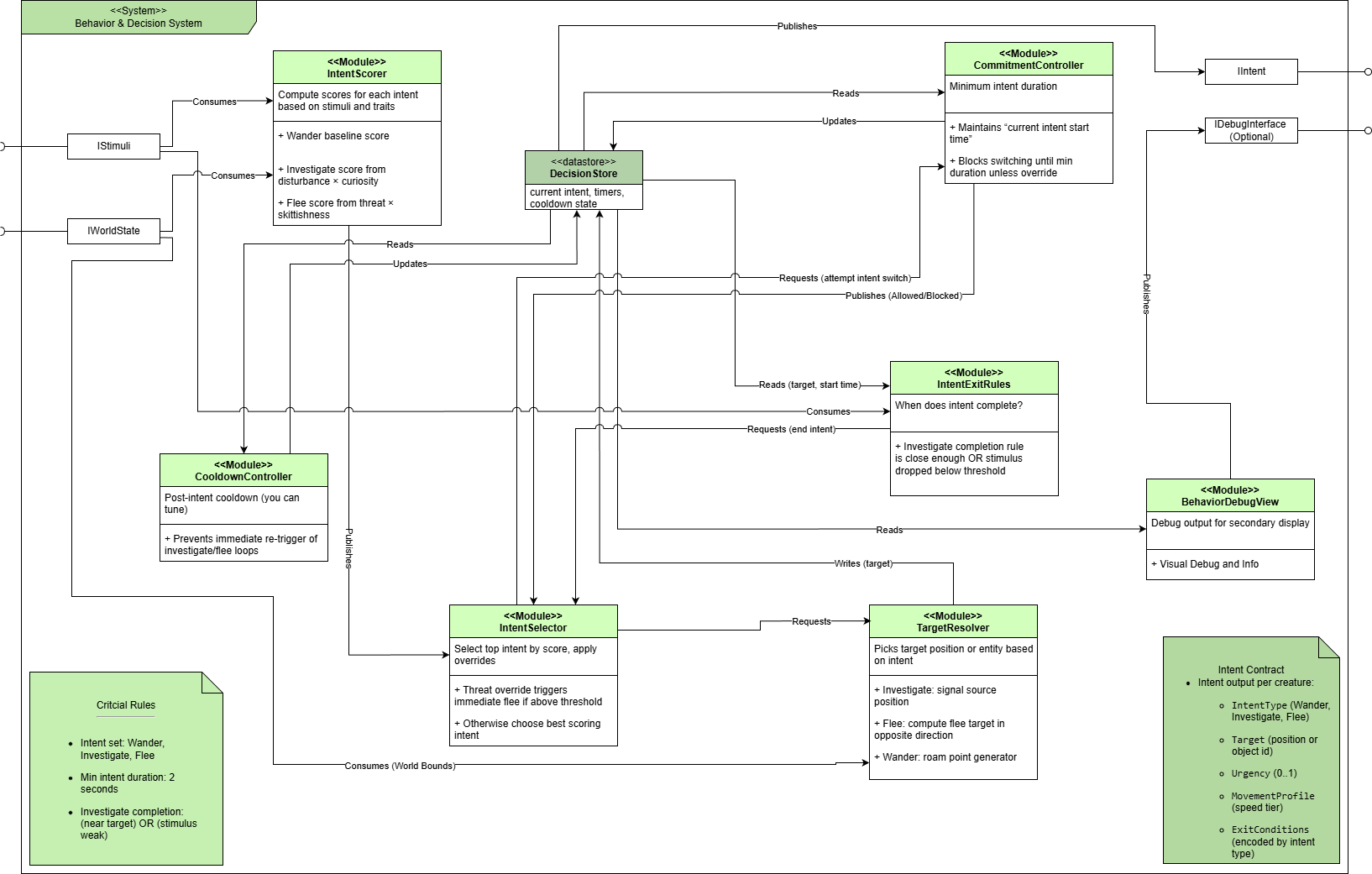
Decision architecture governing intent scoring, selection, commitment, and exit rules.
Behavior & Decision System
Behavior converts stimuli and internal state into intent. The MVP intent set includes Wander, Investigate, and Flee. Intent stability is enforced through minimum duration rules and cooldown controls to prevent rapid oscillation between states.
A major architectural goal here is behavioral readability. Agents should appear purposeful rather than reactive noise. By stabilizing intent transitions and separating scoring, selection, and exit rules, behavior becomes both extensible and predictable.
This system represents the cognitive layer of the simulation. Acting as the "brain" of the agents themselves.
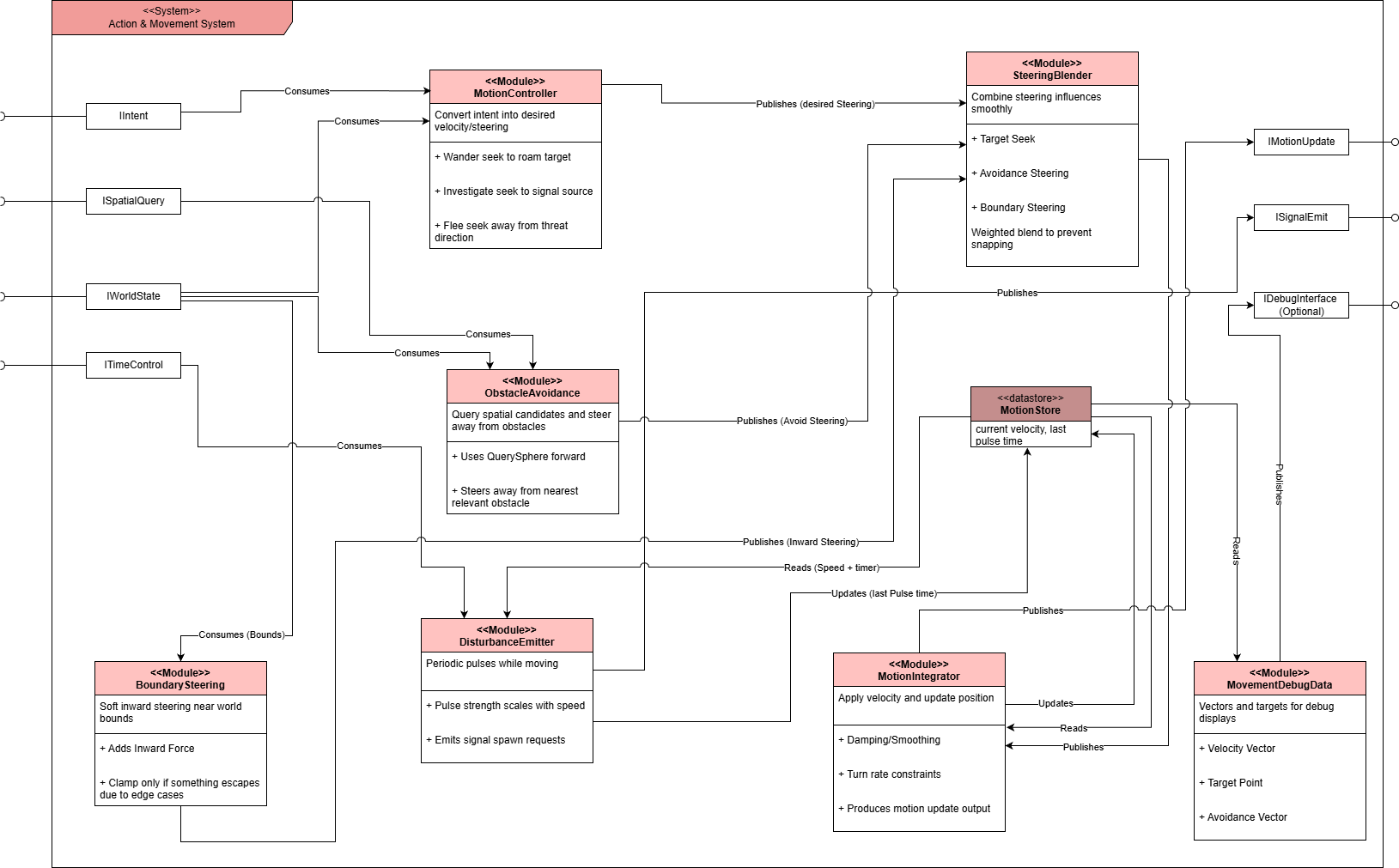
Motion system integrating steering forces, obstacle avoidance, boundary handling, and signal generation.
Action & Movement System
Movement executes intent as smooth physical change. Steering influences such as target seeking, obstacle avoidance, and boundary steering are blended continuously to produce natural motion.
Disturbance emission connects movement back into the environmental signal system, completing the simulation feedback loop. Rather than being a terminal step, movement becomes an active contributor to world dynamics.
This system transforms decisions into visible behavior.
Why This Architecture Matters
Structuring the simulation into clearly defined systems establishes stability, scalability, and conceptual clarity. Each system owns a specific domain of responsibility, reducing unintended coupling and making expansion and modification predictable. More importantly, this separation mirrors the conceptual framework of the capstone itself: observation, containment, perception, and influence.
The UML diagrams are not simply documentation. They function as design constraints that guide implementation decisions.
Next Phase: Implementation
With the architectural framework now established, the next phase focuses on building a functional prototype. Development will begin with World Systems and Spatial Organization, forming the structural backbone required for signals, perception queries, and agent behavior. The immediate objective is achieving a minimal end-to-end simulation loop before expanding complexity.
This marks the transition from system modeling into executable simulation logic.